 |
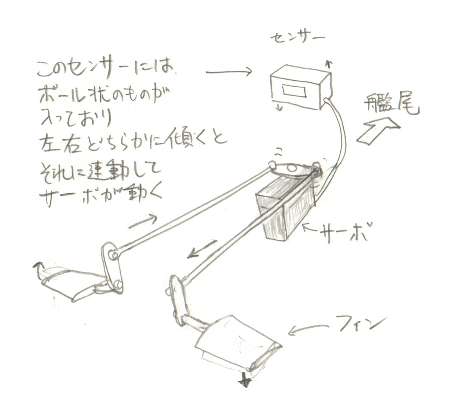
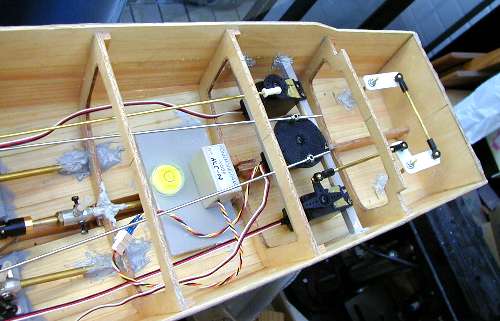
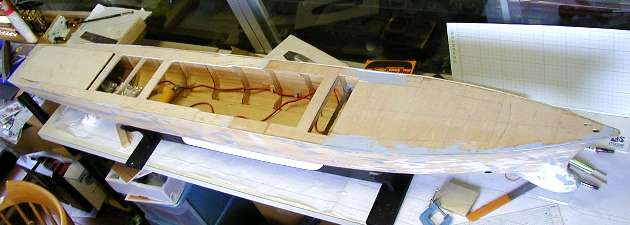
| 上がフィンスタピライザーの仕組みです。 センサーが少しでも片方に傾くとそれを復元するようにサーボが動きます。 下の写真は実際のレイアウトです。サーボの前にある白っぽい四角い箱がセンサーです。 |
 |
| このセンサーはもともと神戸のN氏が潜水艦の姿勢制御用に開発したもので、潜水艦のピッチングに対応しています。 それを横向きに設置してローリングに対応するようにしているわけです。 |
 |
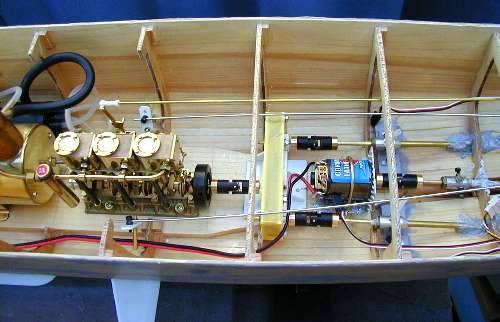
| ちょっとわかりにくいかもしれませんが、実際のサーボとフィンスタピライザーのリンクはこのようになってます。 |
 |
さて、大体のメカの配置を確認したところで、船体制作の方に移ります。 甲板貼りです。完成してからのメンテナンスを考え、ふたが取り外しできるようにします。 |
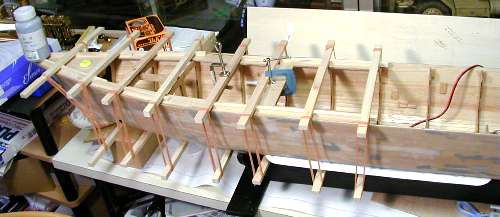 |
| 甲板は4ミリ厚のシナベニヤ。エポキシボンドで接着。棒と輪ゴムで押さえつけて固定します。 こちらは作業時間を考えて60分硬化のエポキシボンドです。 |
 |
| 後ろも甲板を張ります。 本物の護衛艦と同じように甲板に軽いRをつけたので作業が大変。色気を出さずに平面にしておけばよかった。 |
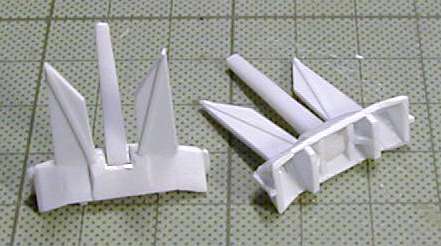 |
| 船の錨(アンカー)は、アドミラリティー型。把駐力(船をとどめる力)が強い形らしいです。プラバンで作りました。幅は24ミリ。 昔から、どうして錨って船を固定できるんだろうと不思議だったのですが、自分で作ってみて理屈がわかりました。 結局、横に引張ると上に伸びた2本の角が砂地に刺さる・・・ということなんですよね。 |
 |
| 錨は艦首にこのようにセットします。 錨のシャンク(鎖とつながる腕のところ)が納まる部分をベルマウスといいます。 中が筒状になっていて鐘のような形をしてるから・・・らしいです。この模型ではベルマウスの中身までは再現していません。 |
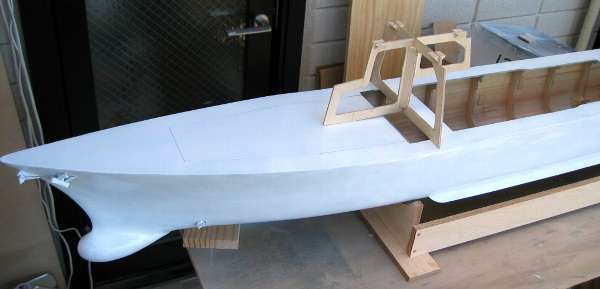 |
| 錨をつけたところで、2液性ウレタンスプレーで全体をコーティング。ウレタン塗料は耐溶剤性があり塗膜も強くて、安心です。 |